共计 1117 个字符,预计需要花费 3 分钟才能阅读完成。
NASA 宣布,其毅力号火星车在火星表面首次借助人工智能生成的路径点规划,完成了自主行驶。这一技术演示旨在显著缩短人类驾驶员绘制行驶路线所需的时间,为未来的火星探测任务带来了新的可能性。
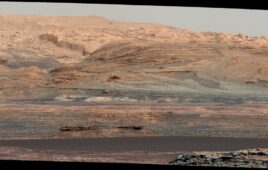
演示于 2025 年 12 月在杰泽罗陨石坑边缘分两次进行。据 NASA 介绍,12 月 8 日,毅力号行驶了 210 米;12 月 10 日,它又行驶了 246 米,总行驶距离约 400 米。而这次行驶所依据的路径点序列,并非由人工绘制,而是由视觉语言模型生成,这标志着人类首次在另一颗行星上完成由人工智能规划的行驶任务。

- 
- 
- 
- 
- 
- 
- 
这一尝试的主要动机源于地球与火星之间的通信延迟。由于两颗行星的相对位置不断变化,单向信号传输时间介于 4 分钟到 24 分钟之间,使得实时的“操纵杆”式遥控驾驶无法实现,而 AI 规划则能有效解决这一难题。
数十年来,火星车团队一直通过分析地形和火星车状态数据来规划行驶路线,并以路径点的形式绘制路径。这些路径点通常间隔不超过 100 米,并通过 NASA 的深空网络上传至火星车。这种谨慎的操作方式,部分源于过往的教训——例如 2009 年勇气号火星车陷入松软土壤,最终导致任务终止。,
Claude 模型如何协助火星车规划路线
在 2025 年 12 月的两次行驶中,毅力号完成了人类首次在另一颗行星上由人工智能规划的行驶任务,总行驶距离约 400 米。
喷气推进实验室的工程师使用 Anthropic 的 Claude 模型,分析来自 HiRISE 轨道相机的高分辨率图像和数字高程模型,生成以火星车标记语言编写的路径点序列——该格式与人类驾驶员使用的基于 XML 的命令格式完全相同。
每一条由人工智能生成的路线,都会先在喷气推进实验室的“数字孪生”模拟环境中进行测试。工程师在此过程中检查超过 50 万个遥测变量,确保指令与火星车的飞行软件完全兼容后,才将其上传至火星。
工程师初步估计,该方法可将路线规划时间缩短约一半,从而在每个任务周期内安排更多行驶与科学探测活动,大幅提升了火星探测的效率。
在本次测试中,人工智能通过分析轨道图像和地形坡度数据,识别出基岩、巨石区、沙波纹等潜在危险,进而规划出带有路径点的连续行驶路线。Anthropic 表示,喷气推进实验室的工程师在检视火星车回传的地面图像后,仅对路线做了微调,包括优化一处从火星车视角看沙波纹更为明显的狭窄通道。
喷气推进实验室的太空机器人专家 Vandi Verma 评价道:“生成式人工智能在简化地外自主导航的核心环节——包括感知环境、定位自身以及规划控制——方面展现出巨大潜力。”
这一突破性的 AI 应用不仅为毅力号火星车带来了更高效的行驶方案,也为未来深空探测的自主导航技术指明了方向。
信息来源:NASA/ 喷气推进实验室,Anthropic
题图来源:Anthropic



